

电力隧道消防机器人的整体系统设计研究
电力隧道消防机器人的整体系统设计研究
夏湛然,杨秀友,田智
(国网武汉供电公司湖北 武汉430000)
[摘要]电力隧道消防机器人的设计应用,是开展电力隧道消防灭火救援,确保电力隧道消防安全,以及为电网安全稳定运行实现提供可靠保障的必要措施。结合电力隧道消防机器人设计应用实际情况,扶机械结构以及驱动、控制等层面,对电力隧道消防机器人的设计进行了研究分析,以促进其在实际中的应用实现。
关键词 电力隧道 消防机器人 整体系统
中图分类号 TM75
0引言
电力隧道的消防设计中,由于受到隧道的特殊性质影响,考虑到消防救援开展实际情况,一旦出现火灾危害,采用普通的消防救援方式,不仅容易发生隧道堵塞,并且火灾产生的浓烟与一般区域不同,不容易消散,救援开展困难比较突出。再加上受隧道通道形式影响,一般的消防设备以及人员进入救援也比较困难,容易造成较大的安全损失。近年来,随着我国社会经济与科学技术的不断发展、进步,消防救援能力以及系统技术水平也不断提升,对于隧道消防机器人的研究设计也相对较多,并且在实际救援过程中也有了应用实现。
1电力隧道的消防安全需求分析
由于电力隧道与其他空间的消防安全情况不同,电力隧道消防安全需求也有区别。一般情况下,电力隧道多用于具有较大容量的电力线路、电缆进行长距离电力传输,空间相对封闭,并且环境潮湿,再加上电方线路以及线缆本身可能存在的易燃特征,在燃烧过程中容易散发有害气体等。因此,一旦电力隧道中发生某根电缆着灾的情况,就会导致火势顺着电缆线路燃烧,并且在燃烧散发出较多的浓烟。再加上电缆线路的燃烧相对比较慢,火灾危险度相对较高,对于分层或交叉电缆还可能会发生产生的安全威胁十分严重。 .
隧道的特殊性导致火灾发生时的特点也不同,不仅空间较为封闭,不容易将燃烧释放的热量以及浓烟等散去,而且可能导致火势严重,发展过快;其次,由于电力隧道的距离比较长,火灾发生时人员疏散也还容易形成烟囱效益,导致火灾传播速度快,最后,受隧道结构形式影响,消防救援开展也比较困难。
2电力隧道消防机器人的设计分析
结合电力隧道消防安全需求以及消防机器人功能结构,其设计主要包括机械结构与驱动、控制三个部分。其中,机械结构中包括机器人的移动以及灭火执行等装置配置,而驱动都分则以电力、液压以及气动驱动三种形式为主,结合实际情况进行设计应用。此外,还需要进行消防机器人控制系统设计实现,并结合消防救援需求进行有效的抗干扰设计,以满足消防机器人开展救援的需求,在实际消防救援中应用实现。
2.1 机械结构设计分析
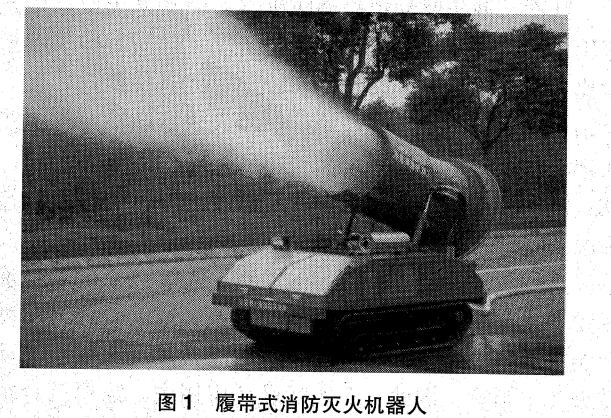
机械结构作为消防机器人整体系统的重要组成部分,对其设计性能以及结构功能都存在着重要的影响。根据消防救援情况,消防机器人机械结构设计主要包括消防机器人的移动装置和灭火执行装置配置。其中,在移动装置配置设计中,当前国内外设计中比较常用的形式有多是步行样式和轮式、履带移动等不同结构形式,它们在实际应用中具有各自不同的特征优势和局限性。考虑到隧道机器人开展消防救援时,隧道地面多不够平坦,再加上电缆线路的交叉设计或分层设计等复杂情况,为确保电力隧道救援开展顺利,多采用履带移动形式作为消防机器人的移动装置。图1为采用履带式移动的消防机器人示意图。
其次,在进行消防机器人灭火执行装置设计中,需要结合隧道火灾特征,从消防灭火的有效性上进行设计。通常情况下,针对不同消防灭火需求的消防机器人,其灭火执行机构设置形式也不同,最常见的有粗筒和细管两种结构形式。其中,细管形式的灭火执行机构主要应用在灭火喷射压力需求较大的远程灭火救援作业中;而粗筒式的灭火执行装置则在排烟消防作业中应用比较多。这种结构形式能够在救援过程中,通过较短的时间排出较多的灭火干粉,实现大面积烟雾吸排,确保消防救援效果。电力隧道火灾发生时,空间封闭,浓烟聚集不容易散去,因此,隧道消防机器人多采用粗筒式的灭火执行装置,以便于及时排除烟雾,控制火势。
在进行消防机器人机械系统设计中,还应注意结合消防作业情况,因为消防作业过程中会受到火灾高温影响,形成较高的辐射与高温气流作用。这种情况下,为使消防机器人中各电子或电器设备装置能够正常运行,需要在机械设计中针对这一结构部分采取防辐射隔热密封设置,对机器人系统进行保护。
2.2电力隧道消防机器人驱动设计
在消防机器人的整体系统中,驱动系统是确保机器人移动操作的重要动力。通常情况下,消防机器人驱动系统由动力源和减速器等结构装置构成。其中,动力源根据驱动选择的方式不同,其具体设计也存在着相应的差别。比较常见的消防机器人驱动方式有电动、气动和液压驱动等。
首先,以电动作为驱动的消防机器人设计多是通过电动机设备对减速器装置进行带动运行,从而实现机器人执行的驱动。这种驱动方式大多比较方便,并且效果好、性能相对较高,应用相对较多。值得注意的是,电动驱动形式在实际驱动应用中,作为消防机器人的驱动系统,需要与减速器之间进行相互配合才能达到较好的驱动效果,因此,进行该种形式的驱动系统设计就相对比较复杂。此外,在进行电动驱动的机器人驱动系统设计中,对于电动机的选择使用需要结合实际情况,合理进行选择,并且不同类型的电动机设备在工作运行中的驱动性能不同。
其次,液压驱动也是消防机器人驱动系统设计中选择应用较多的驱动形式之一。通常情况下,与其他驱动形式相比,液压驱动由于设备体积较小,并且质量比较轻,因此结构相对紧凑,并且在消防机器人执行驱动过程中能够实现较为平稳的运动,是其他驱动形式所不能满足的。因此,液压驱动结构在具有大转矩或者是低速大转矩的操作情况下,设计应用相对较多,这与液压驱动装置能够实现平稳运行驱动的特征有很大的关系。需要注意的是液压驱动形式主要以油液作为驱动动力源,所以受环境温度的影响比较大。如果存在高温作业情况,则会对液压驱动的效果产生影响。因此,在实际设计应用中,需要结合情况慎重选择。,
最后,消防机器入驱动系统设计中,气动驱动也是一种比较常见的驱动形式。这种驱动形式是通过空气压缩机产生出只有较高压力作用的气体。这种气体通过对其他操作执行结构的驱动控制来实现作业。气动驱动形式在实际设计中的应用也比较多。这与气动驱动形式的节能环保特征有很大关系,并且气动驱动装置的操作以及维护也比较方便。但是,由于气动驱动实际操作中输出功率较小,驱动控制作用力小,所以对于具有较高要求的消防作业,其适用性并不突出。
2.3控制系统设计
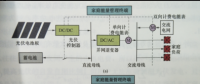
图2为隧道消防机器人的控制系统结构示意图。根据图2可以看出,通常情况下,隧道消防机器人的控制系统设计主要包括硬件和软件两个部分。其中,硬件设计主要是进行控制器的选择应用,根据控制器类型以及性能特点,选择适用于隧道消防作业的设备,以确保其在消防作业过程中起到较好的控制作用。一般情况下,为确保控制器性能,隧道消防机器人多以工控机以及PLC作为控制器核心器件,同时结合其他功能需求,选择相应的设备构件。此外,消防机器人的控制软件设计应根据作业情况,通过作业任务描述以及部件构建、多代理情况描述以及端口对象动态配置、通信等结构功能设置,并通过分布式结构安排,建立能够实现运行管理与控制的系统形式。
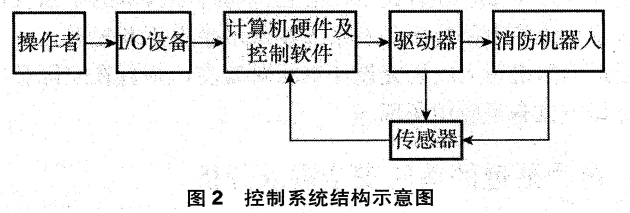
此外,消防机器人作业时,主要是通过探测报警传感控制器对火灾进行准确感知和消防作业执行,因此,火灾报警传感器也是消防机器人系统设计中的重要一部分。整个控制系统采用计算机对机器人工作运行进行控制,并通过控制系统输出或输入电缆信息传输的屏蔽设置,来对其操作安全性进行保护。
3结语
总之,对消防机器人整体系统的设计实现进行研究分析,有利于促进其在电力隧道消防中的设计应用,并为电力隧道消防安全提供可靠保障,具有积极的价值意义。
参考文献
[1]高轶.电力电缆隧道消防技术方案分析[J].电力与能源, 2013,34(5):547-552.
[2]党海昌.消防机器人在我国灭火救援中的应用现状和前景分析[J].消防技术与产品信息,2016(3):69-71.
[3]史强,李露,邱自学,悬吊式高空消防机器人的设计及姿态控制原理[J].机械设计与制造,2012(12):162-164.

责任编辑:继电保护












-

云南能源职业技术学院
2018-06-05云南能源职业技术学院 -

中国科学技术大学热科学和能源工程系
-

重庆能源职业学院
2018-06-05重庆能源职业学院
